

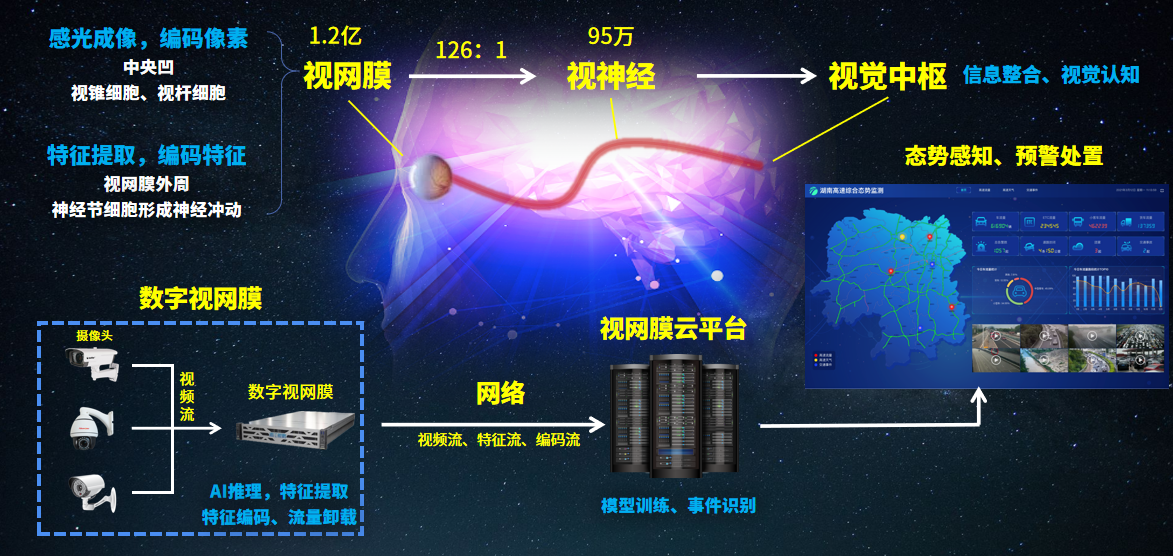
高速公路數字視網膜平臺
平臺采用可伸縮端邊云協同視覺計算架構,通過廣泛部署在高速公路出入口的攝像頭端或邊緣側對視頻進行視頻編碼和視覺特征提取編碼并按需上傳到云端,云端大腦通過高性能的實時計算分析,全面精準的感知高速路網的各種狀態和各類事件。
方案概述
高速公路數字視網膜平臺在可伸縮端邊云協同視覺計算架構的基礎上,深度結合邊緣計算、AI、大數據等相關技術能力,將端側計算遷移到邊緣計算節點,通過部署邊緣AI一體機,在不進行現有攝像頭升級替換的同時,即可構建高速公路等場景的“數字視網膜”體系。
平臺通過邊緣AI一體機強大的AI推理能力,對交通視頻進行實時事件識別,實現事件有效視頻智能提取和AI流量卸載處理,通過視頻編碼、特征編碼以及聯合優化處理,將分析結果推送至云平臺進行告警及相應的處置流程,做到發現早、定位準、響應快,為全知、全息的智慧高速賦能。
方案優勢
兼容現有攝像頭體系最大化節約成本
視網膜平臺兼容現有交通系統的攝像頭體系,不需要對現有的普通攝像頭進行升級或替換,即可通過接入數字視網膜的邊緣AI,實現普通攝像頭的智能化,最大化節約建設成本。
精準地理位置定義全局統一時空ID
每個視網膜細胞(攝像頭)都有一個全局統一的編碼ID(地理坐標+位置序列),攝像頭只要把信息傳送到系統大腦,系統即可識別事件的具體地理位置和時間。
高效視頻編碼能力視頻特征同步監控
高速公路視網膜同時具有高效視頻編碼、高效特征編碼以及對視頻編碼和特征編碼聯合優化的能力,能夠實現在一個碼流里同時對視頻編碼和特征編碼進行監控。
模型算法可更新關注焦點可調節
隨著時間的推移,數字視網膜平臺可不斷更新AI算法模型,通過OTA升級即可實現所有攝像頭的的算法更新;平臺還可以通過后臺控制,可對攝像頭同一畫面的不同區域指定不同的關注優先級,比如賦予它一個感興趣區域的功能,讓它注意某些特別重要的區域,并保留該區域的信息。
核心價值
高速路網全息感知,構建智慧高速體系
數字視網膜全面實時感知高速公路的人、車、路、天氣、事件,結合高速公路其他相關感知設備采集的數據,實現對高速路網的數據采集實時化、感知泛在化、處理智慧化,構建智慧高速體系,實現高速公路的車、路、環境智慧協同。
采用先進技術架構,節約投資及運營成本
通過端、邊、云協同,在現有攝像頭基礎上構建數字視網膜平臺,節省90%帶寬、網絡設備、中心算力資源;采用分布式存儲架構,按需擴展節點,減少一次性成本投入。
全棧國產自主可控,構筑信息安全防線
數字視網膜平臺基于鯤鵬+昇騰AI的技術底座打造,結合自主研發的交通AI大模型,采用專網模式部署,實現端到端的國產自主可控,為平臺提供電信級信息安全防護,確保數據信息的安全。
成功故事


湖南高速取消省界站項目
2019年3月,全國兩會《政府工作報告》中提出“兩年內基本取消全國高速公路省界收費站,實現不停車快捷收費”,交通運輸部迅速作出工作安排,部公路局于2019年3月26日組織召開專題座談會,要求2019年底前基本取消全國高速公路省界收費站。本項目是湖南高速2019年最重要的工程,需按照部要求在年底前取消25個高速省界收費站,實現全國全網一體化收費運行管理。項目軟件系統涉及省中心、分中心以及站級收費軟件系統的重構,拓維與華為聯合提出了全新的解決方案,承接了湖南省取消高速公路省界收費站工程項目新一代收費軟件系統。
湖南高速AI稽核系統項目
隨著全國統一取消高速公路省界收費站,ETC自由流收費成為高速公路的主要收費模式。按照新的設計,自由流收費將依托ETC門架系統計費和收費,門架系統的穩定性、可靠性是關鍵,但收費環境多、情況復雜,錯收、漏收風險加大。同時,長期存在的運營車輛偷逃費行為,也在新業態下變得愈發復雜、多種多樣。此外,收費業主責權分散在各路段,主體增多后,收費情況將變得更復雜,如何幫助路段創造條件與省中心進行精準記賬、對賬校核管理變得更為迫切。高速公路稽核部門是高速運營的“千里眼、順風耳、啄木鳥”。在治理高速公路違法行為的工作中,如何在千萬條交易數據中發現逃費車輛,并追繳通行費是必須深刻研究的重點課題,也是如何做好高速公路“醫生”的重要職責。
湖南省交通運輸安全生產監管監察信息系統項目
交通運輸業是各地經濟社會基礎性、先導性、服務性行業,積極運用信息化手段提升交通運輸行業安全生產監管監察能力,是貫徹落實習近平書記“總體安全觀”,以及安全生產重要思想的重要要求,亦是積極提升各地各級交通運輸行業管理部門安全生產監管監察能力的重要要求。 湖南省地處京廣經濟帶、長江經濟帶和泛珠三角經濟區的接合部,具有運力運量規模大、危險品運輸企業多、過境交通頻繁,以及地理與氣候環境較為復雜等特點,是較大及以上等級交通運輸安全生產事故易發區域。面臨新時代“交通強國”湖南篇建設更高要求,湖南省交通運輸安全生產監管監察信息化建設仍存在改進提升的空間,全省交通運輸行業管理部門“區域安全生產整體情況的掌握、行業安全生產監管監察能力、各級行業管理部門之間業務聯動能力、基于數據的管理分析和決策能力”等都需要進一步改善,積極提升湖南省安全生產監管監察能力,迫在眉睫。
 公眾號二維碼
公眾號二維碼 視頻號二維碼
視頻號二維碼聯系電話: 0731-88799888